| | Advanced Graphics
Examples class 3
- [2009 P7 Q2] State the Jordan curve theorem [1
mark]. Given point V and simple convex planar
polygon P
 in in
 , express: , express:
- A test for whether V is coplanar with P. [1 mark]
- A test for whether V lies strictly inside P. [2
marks]
- A test for whether V lies on the border of P. [1
mark]
- What is the angle deficit of a vertex, AD(v)? [2 marks]
Given a closed orientable polyhedral surface of genus g, what is the sum,
 AD(v), of the angle deficits for all vertices on the surface?
[3 marks] AD(v), of the angle deficits for all vertices on the surface?
[3 marks]
- Various bounding volumes can be used to accelerate intersection tests. In
what circumstances would it be appropriate to use:
- axis-aligned bounding boxes?
- oriented bounding boxes?
- bounding spheres?
[5 marks]
- [2005 P7 Q3] Brian and Geoff Wyvill developed a blobby object
modelling method where the blobby object is defined by a number, n, of
centres,
 , each with an associated radius, , each with an associated radius,  . They
define a function . They
define a function
 |
(1) |
and sum the contributions from all centres to give a function over all space
 |
(2) |
The surface of the blobby object is defined as all points,
 ,
where ,
where
 |
(3) |
Sketch, in 2D, the 2D blobby ``surface'' for each of the following cases:
- n = 2,
 = (0, 0), = (0, 0),  = 2, = 2,
 = (4,
0), = (4,
0),  = 2; [2 marks] = 2; [2 marks]
- n = 2,
= (0, 0), = 2,
= (2,
0), = 2; [2 marks]
- n = 2,
= (0, 0), = 2,
= (3,
0), = 4; [2 marks]
Describe variations of equation (2) which allow for:
- CSG union of blobby objects; [1 mark]
- CSG intersection of blobby objects; [1 mark]
- CSG difference of blobby objects. [2 marks]
- An approximate polygonization is used to visualize the isosurface
(such as an implicit, `blobby' surface) of a 3D field. The most popular
methods for constructing this polygonization operate on volumetric cubes, but
these can introduce `ambiguous' cases which prevent the construction of a
watertight polygonization. Briefly describe methods which are available to
guarantee a watertight polygonization:
- without using additional samples from the 3D field (required when
visualising MRI data, for example); [3 marks]
- when it is possible to sample the field at new positions (when blobby
modelling, for example). [3 marks]
- The function renderSquare() executes OpenGL commands to draw a
square with vertices at (-1, -1), (-1, 1), (1, 1) and (1, -1). Sketch the
shape drawn in the xy-plane by the following sequence of OpenGL commands:
[4 marks]
glPushMatrix();
glTranslatef(1, 1, 0);
glPushMatrix();
glRotatef(45, 0, 0, 1);
renderSquare();
glPopMatrix();
renderSquare();
glPopMatrix();
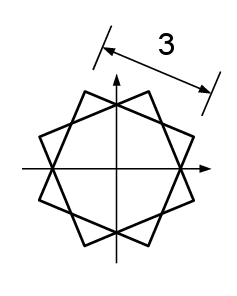
Show how the above sequence should be modified to produce this shape instead:
[4 marks]
- Bump mapping and displacement mapping are two ways of adding detail to a
surface during rendering (you may need to refer to the Part IB course to
refresh your memory on these techniques). Which stage of the OpenGL
pipeline must be modified to provide
- bump mapping?
- displacement mapping?
What problems do you envisage in implementing displacement mapping using an
OpenGL shader? Mention any recent developments in shader technology that
might provide a solution to these problems. [4 marks]
- What is the difference between gl_NormalMatrix and
gl_ModelViewMatrix? What is gl_NormalMatrix used for? Why
can't gl_ModelViewMatrix be used for this purpose? [3 marks]
For a surface with a normal vector n and a tangent vector
t, we have n.t = 0.
If M, the gl_ModelViewMatrix, transforms the tangent
to Mt, then N, the gl_NormalMatrix,
must satisfy the equation Nn.Mt = 0. Show how this
condition gives N in terms of M. [4
marks]
(Hint: we can write n.t as
 . What does the condition
Nn.Mt = 0 look like in this form?) . What does the condition
Nn.Mt = 0 look like in this form?)
This exercise set is marked out of 50. This should take 90
minutes in an examination.
|