| | Computer Vision
2008–09
Lecturer: Dr John Daugman
Taken by: Part II
Prerequisite course: Mathematical Methods for CS; Probability
Aims
The aims of this course are to introduce the principles, models and
applications of computer vision, as well as some mechanisms used in
biological visual systems that may inspire design of artificial ones.
The course will cover: image formation, structure, and coding;
edge and feature detection; neural operators for image analysis;
texture, colour, stereo, and motion; wavelet methods for visual coding
and analysis; interpretation of surfaces, solids, and shapes; data fusion;
dynamic information; probabilistic classifiers; visual inference and learning;
and face detection, encoding, recognition, and interpretation.
Lectures
- Goals of computer vision; why they are so difficult.
How images are formed, and the ill-posed problem of
making 3D inferences from them about objects and their
properties.
- Image sensing, pixel arrays, CCD cameras. Image coding
and information measures. Elementary operations on image arrays.
- Biological visual mechanisms from retina to cortex.
Photoreceptor sampling; receptive field profiles; spike train coding;
channels and pathways. Neural image encoding operators.
- Mathematical operations for extracting image structure.
Finite differences and directional derivatives.
Filters; convolution; correlation. 2D Fourier domain theorems.
- Edge detection operators; the information revealed by edges.
The Laplacian operator and its zero-crossings. Logan's Theorem.
- Multi-resolution representations. Active contours.
2D wavelets as visual primitives.
- Higher level visual operations in brain cortical areas.
Multiple parallel mappings; streaming and divisions of labour;
reciprocal feedback through the visual system.
- Texture, colour, stereo, and motion descriptors.
Disambiguation and the achievement of invariances.
- Lambertian and specular surfaces.
Reflectance maps. Discounting the illuminant when
infering 3D structure and surface properties.
- Shape representation. Inferring 3D shape from shading; surface geometry.
Boundary descriptors; codons; superquadrics and the "2.5-Dimensional" sketch.
- Perceptual psychology and visual cognition. Vision
as model-building and graphics in the brain. Learning to see.
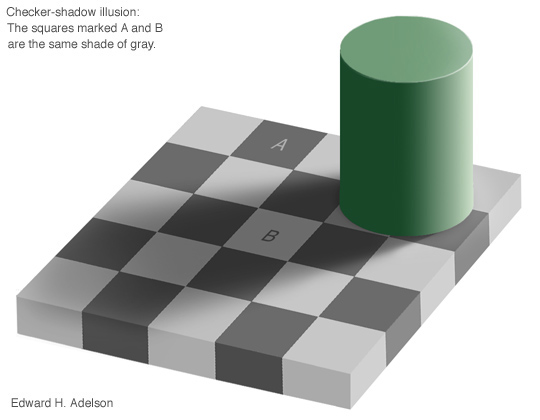
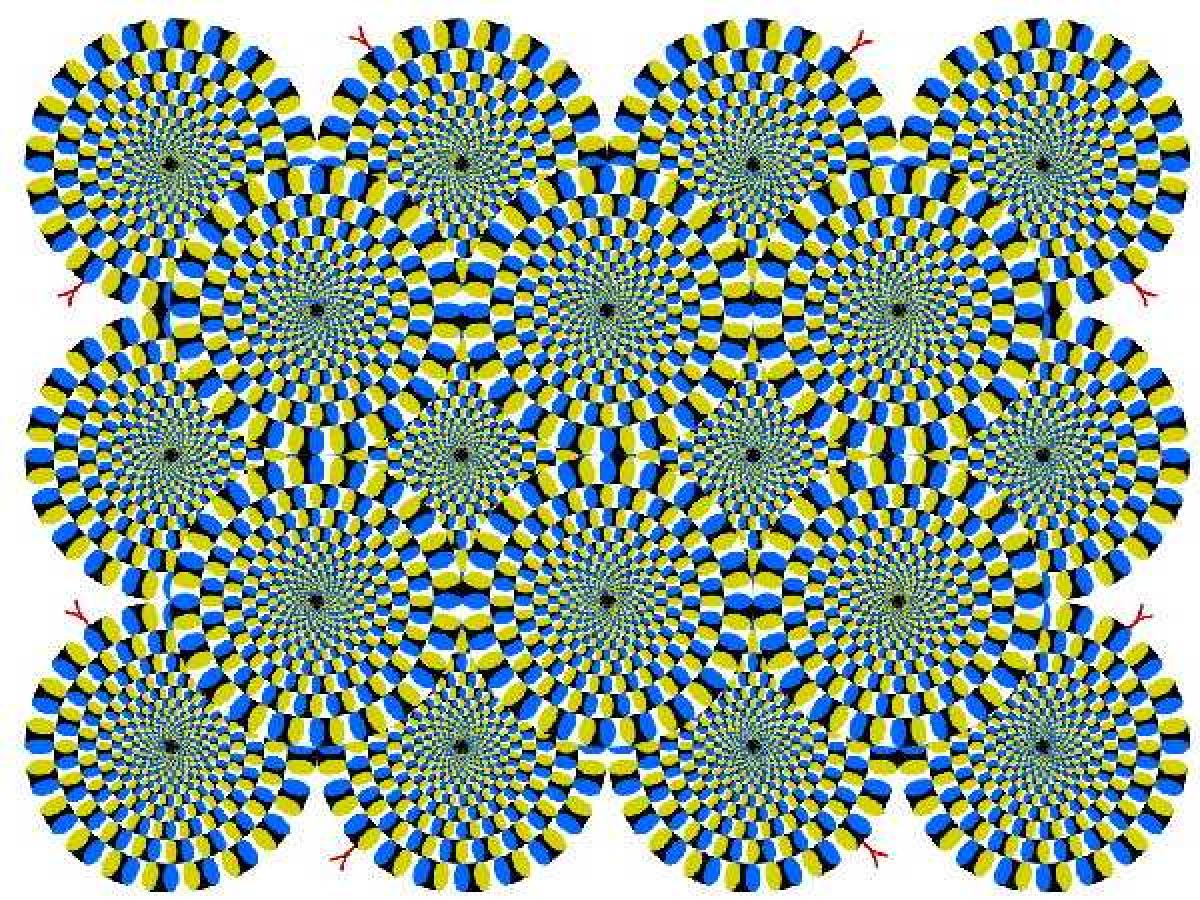
- Lessons from neurological trauma and visual deficits.
Visual illusions and what they may imply about how vision works.
- Bayesian inference in vision; knowledge-driven
interpretations. Classifiers. Probabilistic methods in vision.
- Object-centred coordinates.
Appearance-based versus volumetric model-based vision.
- Vision as a set of inverse problems. Mathematical methods
for solving them.
- Approaches to face detection, face recognition, and facial interpretation.
Objectives
At the end of the course students should
- understand visual processing from both "bottom-up" (data oriented) and
"top-down" (goals oriented) perspectives
- be able to decompose visual tasks into sequences of image analysis
operations, representations, specific algorithms, and inference principles
- understand the roles of image transformations and their invariances
in pattern recognition and classification
- be able to analyse the robustness, brittleness, generalisability,
and performance of different approaches in computer vision
- be able to describe key aspects of how biological visual systems
encode, analyse, and represent visual information
- be able to think of ways in which biological visual strategies might be
implemented in machine vision, despite the enormous differences in hardware
- understand in depth at least one major practical application domain,
such as face recognition, detection, and interpretation
Reference books
Shapiro L and Stockman G (2001). Computer Vision.
(Prentice Hall: ISBN 0-13-030796-3)
Duda R O, Hart P E, and Stork D G (2001). Pattern Classification,
2nd ed. (Wiley: ISBN 0-471-05669-3)
Other resources on-line
|
{kind=link}
{kind=link}