
TESLA
Assertions and automata
This page provides a high-level overview of the TESLA primitives made available to programmers wishing to add temporal assertions to their code after setting up the build environment. Programmers wishing to extend TESLA itself should consult the API documentation.
Most code examples on this page come from demos/smoketest/example.c in the TESLA repository.
Header files
TESLA's header file (tesla.h) defines TESLA
primitives with a __tesla prefix to avoid namespace collisions.
Rather than using these primitives directly, we recommend that you take
the template tesla-macros.h
and modify it for your needs, eliminating collisions with names in your project
but keeping most of the programmer-friendly names that it suggests.
Assertions and automata
TESLA accepts two types of input: inline assertions and explicit automata. Both inputs describe the expected temporal behaviour of software; TESLA checks actual run-time behaviour against such descriptions.
Inline assertions
Inline assertions are typically declared with the
TESLA_GLOBAL or
TESLA_PERTHREAD macros, or else the
per-thread convenience wrapper
TESLA_WITHIN.
These macros wrap the
__tesla_inline_assertion function,
which expects several arguments:
-
an assertion location
- filename, line number and counter
- provided implicitly by the above macros
-
a storage and synchronisation context
- global or per-thread
- provided implicitly by the above macros
-
context bounds, at which all instances of an automaton should be
initialised and cleaned up
- bounds must be concrete events rather than abstract expressions
-
TESLA_GLOBALandTESLA_PERTHREADexpect explicit start and end bounds -
TESLA_WITHINexpects a function whose entry and exit are the start and end bounds
- a TESLA expression
For example, a simple assertion taken from
demos/smoketest/example.c:
/* A very simple TESLA assertion. */
TESLA_WITHIN(example_syscall,
previously(security_check(ANY(ptr), o, op) == 0));
Explicit automata
Programmers can also describe automata directly; this is useful for explicit state machines such the TCP state machine.
Automata are declared and defined like C functions. The expected signature is:
/* Declarations */
automaton(assertion_name, struct struct_type *);
automaton(some_other_automaton, struct struct_type *);
/* Definition */
automaton(assertion_name, struct struct_type *sp)
{
/*
* a sequence of TESLA expressions
* that reference the 'sp' pointer,
* for instance:
*/
some_other_automaton(sp);
done;
}
The single variable referenced by the automaton must be declared as a formal parameter. All sub-automata (e.g. some_other_automaton() in the above example) must operate on the same type.
Automata are bound to structure instance lifetimes with the TESLA_STRUCT_AUTOMATON macro:
TESLA_STRUCT_AUTOMATON(struct tcpcb *tp, my_tcpcb_assertion, GLOBAL,
called(tcp_init(tp)),
returned(tcp_free, tp));
TESLA expressions
There are nine kinds of TESLA expressions: three abstract expressions, three concrete events and three control predicates.
- abstract
- concrete
- control predicates
Abstract expressions
Boolean expression
TESLA expressions may be combined with boolean operators.
Currently, the only supported operator is OR ('||').
instead of a AND b, programmers can write
a and b as separate
assertions.
Sequence
A sequence of events can be specified with the TSEQUENCE macro, whose parameters are themselves TESLA expressions. For instance:
TSEQUENCE(
foo(x) == 0,
bar(y) || baz(z)
)
Many simple assertions can be written with the
previously
and
eventually
keywords, which provide wrappers around
TSEQUENCE:
/** A more programmer-friendly way to write assertions about the past. */
#define previously(...) TSEQUENCE(__VA_ARGS__, TESLA_NOW)
/** A more programmer-friendly way to write assertions about the future. */
#define eventually(...) TSEQUENCE(TESLA_NOW, __VA_ARGS__)
Sub-automaton
Automata can "include" explicitly-declared automata by "calling" them:
automaton(active_close, struct tcpcb*);
automaton(established, struct tcpcb*);
automaton(my_tcpcb_assertion, struct tcpcb *tp)
{
tp->t_state = TCPS_SYN_RECEIVED,
established(tp) || active_close(tp)
}
Concrete expressions
Function invocation
Programmers can specify that they expect a function to be called with particular parameters and/or return a particular value. This specification can be written in a very C-like manner:
/* A very simple TESLA assertion. */
previously(security_check(ANY(ptr), o, op) == 0)
This specifies that, within the TESLA automaton's bounds,
the security_check() function was previously called with the parameters
o and op and that it
returned 0.
The first parameter
ANY(ptr)
is a "don't care": any call to security_check() with
o and op that returns 0
satisfies the expression.
Argument values can be derived from structure fields, as shown here:
previously(security_check(ANY(ptr), o, some_struct->operation) == 0)
Bitmask arguments can be described with
flags(FLAG1|FLAG2),
meaning that FLAG1 and FLAG2 must be present
in the argument,
or bitmask(FLAG1|FLAG2),
meaning that only FLAG1 and FLAG2
may be present in the mask.
Values passed or returned by reference may be referred to using the address-of operator. The value referred to is the value pointed to at the moment of call or return, depending on whether a call or return is being described.
int get_object(int id, struct **ptr_out);
/* [...] */
{
struct object *o = a_pointer_from_somewhere;
TESLA_WITHIN(some_function, previously(get_object(ANY(int), &o)));
To instrument a function call, rather than return, the programmer can use the
called() macro:
/* An even simpler assertion! */
TESLA_WITHIN(example_syscall, previously(called(security_check)));
TESLA_WITHIN(example_syscall, previously(called(hold(o))));
called() takes the
expected function as its first parameter and may optionally be passed
parameters that represent expected function parameters.
As above, ANY can be
used as a "don't care" value.
Function return may also be specified with the
returned() macro,
which acts like called()
and, unlike the C-style expression above, can be used with void functions:
TESLA_WITHIN(example_syscall, previously(returned(hold, o)));
Functions can be instrumented in the caller or callee context; see below for more information.
Structure field assignment
Assertions and automata can also specify that constant values should be
assigned to a structure field.
Assignments can be simple (e.g. s.foo = 1)
or compound (e.g. s.foo += 1 or s.foo++), but
a single automaton should not describe both simple and compound assignments
to the same structure field.
Mixing assignment types can confuse this instrumentation: if the old value is 0 and the new value is 1, is this an assignment of constant value 1 or an increment operation? Such mixing will trigger a compiler warning:
Currently, fields whose accesses are to be instrumented must be manually annotated with an attribute of the following form:
__attribute__((annotate("field:struct_name.field_name")));
We will remove this limitation in the future by either modifying Clang to make it produce field annotation on demand or else by changing the way the field access instrumentation detects accesses.
"Now"
The TESLA_NOW event refers to
the moment at which an assertion site is reached.
For instance, in the following code:
int foo(int x) { return 0; }
void bar()
{
int i = 42;
foo(i);
TESLA_WITHIN(bar,
TSEQUENCE(
foo(42) == 0,
TESLA_NOW,
foo(43) == 0
)
);
foo(++i);
}
TESLA instrumentation will produce five events when bar()
is called:
- enterered
bar foo(42)returned 0TESLA_NOWfoo(43)returned 0- leaving
bar
Control predicates
Optional expression
Any expression inside an optional()
predicate is permitted but not required to occur.
This is most useful in combination with
strict mode (described below).
Caller vs callee context
By default, TESLA instruments function calls and returns in the callee
context, where instrumentation only has to be done once.
It is possible to explicitly choose between callee- and caller-context
instrumentation using the callee()
and caller() predicates, which may
be nested arbitrarily:
TESLA_WITHIN(foo,
caller(
TSEQUENCE(
fn1() == 0,
fn2() == 0,
callee(
TSEQUENCE(
fn3() == 0,
caller(fn4() == 0),
fn5() == 0
)
||
fn6() == 0
),
fn7() == 0
)
)
);
This the following caller- and callee-context function instrumentation:
| Caller context | Callee context |
|---|---|
|
fn1 fn2 fn4 fn7 |
fn3 fn5 fn6 |
Strict vs conditional mode
Sometimes, it is desirable to specify the exact behaviour of the system:
"the following events can only ever occur according to this automaton".
Other times, the programmer wants to specify that "on this code path,
the behaviour of the sytem is ...".
These modes can be selected from using the
strict()
and
conditional()
predicates.
In strict() mode (the default for
explicit automata representations), it is an error for any named event to
occur outside of the sequences described by the given automaton.
For instance, if an automaton includes the event
tcp_control_block->t_state = TCPS_CLOSING,
it is an error for TCPS_CLOSING to be assigned to
tcp_control_block->t_state outside of the automaton.
In conditional() mode (the default
for inline automata), any named event can occur at any time unless the code
path includes the TESLA_NOW event; then the system must
behave as described in the automaton.
For instance, many FreeBSD kernel assertions may reference the function
syscallenter(); it is only an error for this function event to
occur in a way not described by an assertion if we are on the code path
described by that assertion.
The difference between automata generated in strict and conditional mode is illustrated here:
| Strict mode | Conditional mode (NFA) |
|---|---|
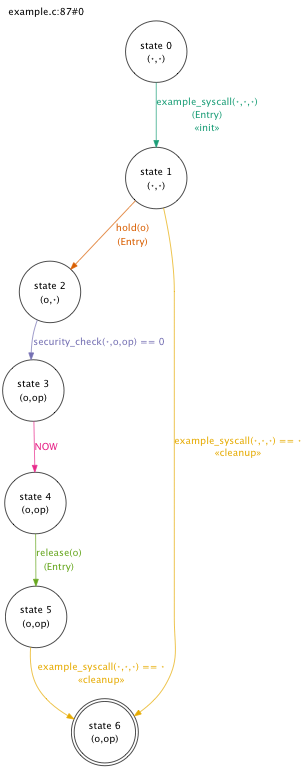 |
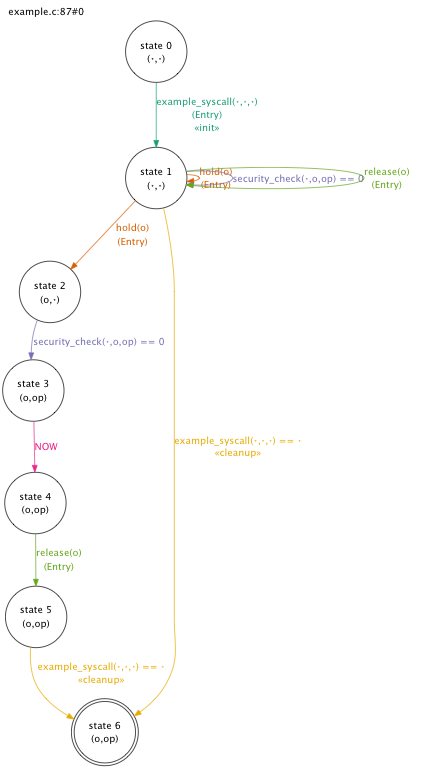 |