Selected Publications
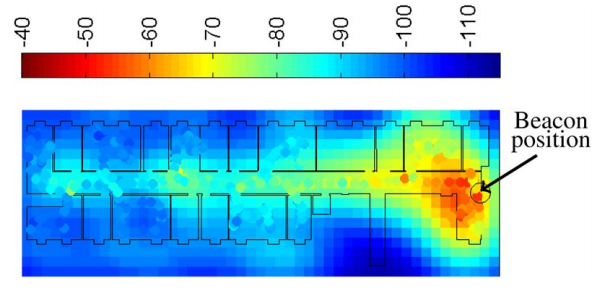
Location fingerprinting with bluetooth low energy beacons
The complexity of indoor radio propagation has resulted in location-awareness being derived from empirical fingerprinting techniques, where positioning is performed via a previously-constructed radio map, usually of WiFi signals. The recent introduction of the Bluetooth Low Energy (BLE) radio protocol provides new opportunities for indoor location. It supports portable battery-powered beacons that can be easily distributed at low cost, giving it distinct advantages over WiFi. However, its differing use of the radio band brings new challenges too. In this work, we provide a detailed study of BLE fingerprinting using 19 beacons distributed around a ~600 m$^2$ testbed to position a consumer device. We demonstrate the high susceptibility of BLE to fast fading, show how to mitigate this, and quantify the true power cost of continuous BLE scanning. We further investigate the choice of key parameters in a BLE positioning system, including beacon density, transmit power, and transmit frequency. We also provide quantitative comparison with WiFi fingerprinting. Our results show advantages to the use of BLE beacons for positioning. For one-shot (push-to-fix) positioning we achieve <; 2.6 m error 95% of the time for a dense BLE network (1 beacon per 30 m$^2$), compared to <; 4.8 m for a reduced density (1 beacon per 100 m$^2$) and <; 8.5 m for an established WiFi network in the same area.
IEEE JSAC
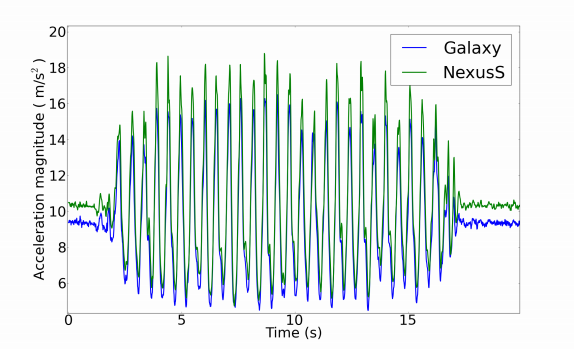
Walk detection and step counting on unconstrained smartphones
Smartphone pedometry offers the possibility of ubiquitous health monitoring, context awareness and indoor location tracking through Pedestrian Dead Reckoning (PDR) systems. However, there is currently no detailed understanding of how well pedometry works when applied to smartphones in typical, unconstrained use. This paper evaluates common walk detection (WD) and step counting (SC) algorithms applied to smartphone sensor data. Using a large dataset (27 people, 130 walks, 6 smartphone placements) optimal algorithm parameters are provided and applied to the data. The results favour the use of standard deviation thresholding (WD) and windowed peak detection (SC) with error rates of less than 3%. Of the six different placements, only the back trouser pocket is found to degrade the step counting performance significantly, resulting in undercounting for many algorithms.
UbiComp 2013
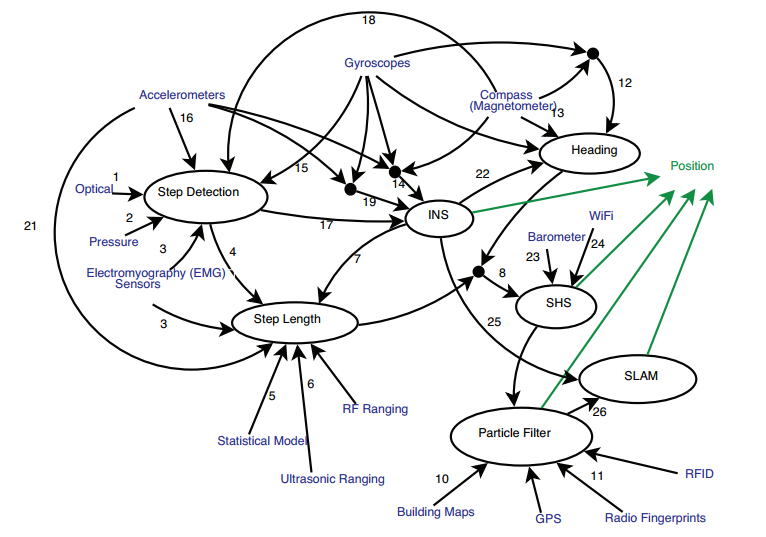
A Survey of Indoor Inertial Positioning Systems for Pedestrians.
With the continual miniaturisation of sensors and processing nodes, Pedestrian Dead Reckoning (PDR) systems are becoming feasible options for indoor tracking. These use inertial and other sensors, often combined with domain-specific knowledge about walking, to track user movements. There is currently a wealth of relevant literature spread across different research communities. In this survey, a taxonomy of modern PDRs is developed and used to contextualise the contributions from different areas. Techniques for step detection, characterisation, inertial navigation and step-and-heading-based dead-reckoning are reviewed and compared. Techniques that incorporate building maps through particle filters are analysed, along with hybrid systems that use absolute position fixes to correct dead-reckoning output. In addition, consideration is given to the possibility of using smartphones as PDR sensing devices. The survey concludes that PDR techniques alone can offer good short- to medium- term tracking under certain circumstances, but that regular absolute position fixes from partner systems will be needed to ensure long-term operation and to cope with unexpected behaviours. It concludes by identifying a detailed list of challenges for PDR researchers.
IEEE Communications Surveys and Tutorials
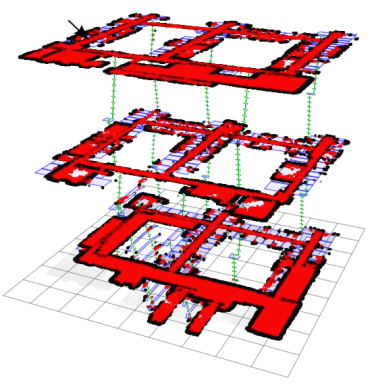
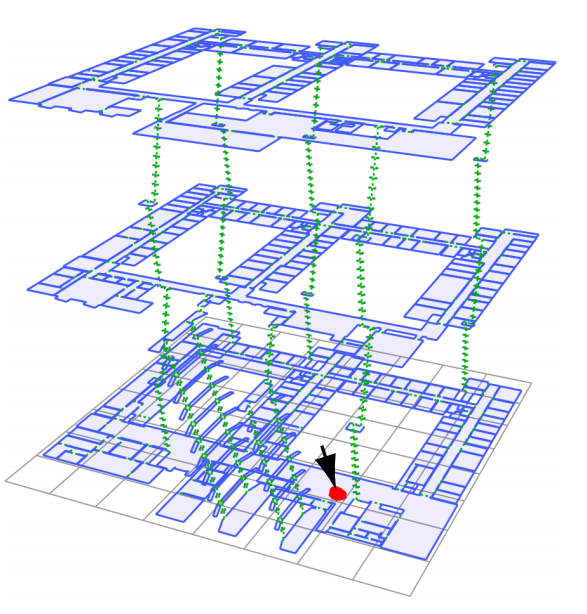
Pedestrian localisation for indoor environments
Location information is an important source of context for ubiquitous computing systems. This paper looks at how a foot-mounted inertial unit, a detailed building model, and a particle filter can be combined to provide absolute positioning, despite the presence of drift in the inertial unit and without knowledge of the user’s initial location. We show how to handle multiple floors and stairways, how to handle symmetry in the environment, and how to initialise the localisation algorithm using WiFi signal strength to reduce initial complexity. We evaluate the entire system experimentally, using an independent tracking system for ground truth. Our results show that we can track a user throughout a 8725 m2 building spanning three floors to within 0.5 m 75% of the time, and to within 0.73 m 95% of the time.
Proceedings of the 10th international conference on Ubiquitous computing