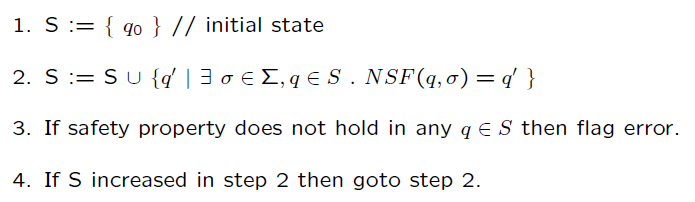
For a small finite state machine we can use a simple model checker for a state safety property:
Algorithm: `Find reachable state space' (add successors of current set until closure):
S can be held explicitly in bit map form or symbolically as a BDD.
Variation 1: ignore safety property while finding reachable state space then finally check for all found states.
Variation 2: property to check might be a path property, so either
| 23: (C) 2012-18, DJ Greaves, University of Cambridge, Computer Laboratory. |