Dependable Systems for Sentient Computing
Abstract
Computers and electronic devices are continuing to proliferate throughout our lives. Sentient Computing systems aim to reduce the time and effort required to interact with these devices by composing them into systems which fade into the background of the user's perception. Failures are a significant problem in this scenario because their occurrence will pull the system into the foreground as the user attempts to discover and understand the fault. However, attempting to exist and interact with users in a real, unpredictable, physical environment rather than a well-constrained virtual environment makes failures inevitable.
This dissertation describes a study of dependability. A dependable system permits applications to discover the extent of failures and to adapt accordingly such that their continued behaviour is intuitive to users of the system.
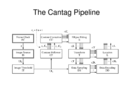
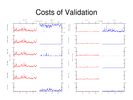
Cantag, a reliable marker-based machine-vision system, has been developed to aid the investigation of dependability. The description of Cantag includes specific contributions for marker tracking such as rotationally invariant coding schemes and reliable back-projection for circular tags. An analysis of Cantag's theoretical performance is presented and compared to its real-world behaviour. This analysis is used to develop optimised tag designs and performance metrics. The use of validation is proposed to permit runtime calculation of observable metrics and verification of system components. Formal proof methods are combined with a logical validation framework to show the validity of performance optimisations.
Slides