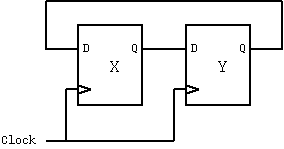
// Example: swap data between a pair of registers
reg [7:0] X, Y;
always @(posedge clock) begin
X <= Y;
Y <= X;
end
// E.g. if X=3 and Y=42 then Y becomes 3 and X becomes 42.
to insert arbitrary delay figures in our source code, yet some sort of delay is needed to make synchronous hardware work correctly. The solution is the delta cycles.
For correct behaviour of synchronous edge-triggered hardware, the propagation delay of D-types must be greater than their hold time.
Question : How can we ensuse this in a technology-neutral model that does not have any specific numerical delays ?
// Example: swap data between a pair of registers
reg [7:0] X, Y;
always @(posedge clock) begin
X <= Y;
Y <= X;
end
// E.g. if X=3 and Y=42 then Y becomes 3 and X becomes 42.
| |
Answer: Hardware simulators commonly support the compute/commit or `signal' paradigm for non-blocking updates. The signal has current and next values.