
The Bat Ultrasonic Location System
People

Andy Ward |

Pete Steggles |

Rupert Curwen |

Paul Webster |

Mike Addlesee |

Joe Newman |

Paul Osborn |

Steve Hodges |
Introduction
Our first experiments with context-aware systems used room-scale information generated by infrared Active Badges, but many applications require fine-grained 3D location and orientation information which Active Badges cannot supply. We have therefore developed a 3D ultrasonic location system (known here as the Bat System) which is low-power, wireless and relatively inexpensive.Theory
|
The ultrasonic location system is based on the principle of
trilateration - position finding by measurement of distances
(the better-known principle of triangulation refers to
position finding by measurement of angles).
A short pulse of ultrasound is emitted from a transmitter (a Bat) attached to the object to be located, and we measure the times-of-flight of the pulse to receivers mounted at known points on the ceiling. The speed of sound in air is known, so we can calculate the distances from the Bat to each receiver - given three or more such distances, we have enough information to determine the 3D position of the Bat (and hence that of the object on which it is mounted). By finding the relative positions of two or more Bats attached to an object, we can calculate its orientation. Furthermore, we can deduce some information about the direction in which a person is facing, even if they carry only a single Bat, by analysis of the pattern of receivers that detected ultrasonic signals from that transmitter, and the strength of signal they detected. |
 |
Implementation
| The photograph on the right shows a Bat which may be attached to objects or carried by personnel (a more detailed internal view can be found here). Bats measure 7.5cm x 3.5cm x 1.5 cm, and are powered by a single 3.6V Lithium Thionyl Chloride cell, which has a lifetime of around fifteen months. Each Bat has a unique 48-bit code, and is linked with the fixed location system infrastructure using a bidirectional 433MHz radio link. Bats have two buttons, two LEDs and a piezo speaker, allowing them to be used as ubiquitous input and output devices, and a voltage monitor that allows their battery status to be interrogated remotely. |  |
{kind=link}
| The receivers used to detect the ultrasonic signals rest above the tiles of a suspended ceiling (commonly found in office buildings). Receivers are placed in a square grid, 1.2m apart, and are connected by a high-speed serial network in daisy-chain fashion. The serial network is terminated by a DSP calculation board, which collects results from the receivers and uses them to compute transmitter positions. | 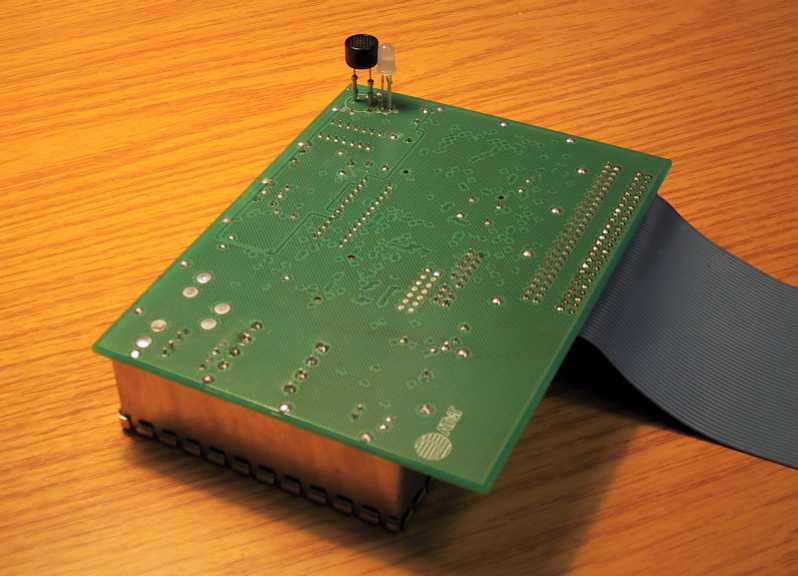 |
A central controller coordinates the Bats and the receiver chains. When a Bat is to be located, the controller addresses it over the radio link, and it transmits a pulse of ultrasound at a known time. Once its position has been found by the DSP calculation boards, the controller fuses the knowledge of which Bat was triggered and where a Bat was seen to be located, and passes the resulting location sighting to client middleware and applications. The central controller can also tell Bats when they are next likely to be addressed, allowing them to sleep in the intervals between polling messages and substantially increasing the battery lifetime.
The system has been designed to scale to very large buildings containing many mobile objects. A cellular radio architecture in which Bats hand over between different controllers is used, permitting spaces of any size to be covered. Objects can be given individual location qualities-of-service, depending on their level of mobility, thus sharing location resources fairly between them. Registration protocols allow Bats entering buildings to make their presence known to the central controllers, and allow the controllers to reclaim location resources again when Bats leave the tracking space.
Deployment
| We have deployed the ultrasonic location system throughout our
building, using 720 receivers to cover an area of around 1000m2 on
three floors. The system can determine the positions of up to 75
objects each second, accurate to around 3cm in three dimensions.
A wide range of applications that use fine-grained location information have been developed as part of our Sentient Computing project, and these applications are in everyday use within our laboratory. |
 |
| We can use the bidirectional radio channel between the central controller and the Bats to monitor the battery terminal voltage on individual Bats. The graph on the right shows the battery terminal voltage for one particular Bat over a period of fifteen months - readings are taken approximately once a day. It can be seen that the power-saving techniques used in the Bat give a very respectable battery lifetime, and the system will automatically notify the system maintainers when the Bat's terminal voltage finally falls below 3.1 Volts. All power saving is done automatically by the system - Bats have no on-off switch! |  |
Current Work
Our current work focusses on improving the ease-of-deployment, maintainability and performance of the system. We want to minimise the amount of specialised cabling that must be put into a building to support the Bat system (by using existing networks such as Ethernet to coordinate the system) and we're redesigning the system to use an infrared (rather than radio) communications channel to improve cellular reuse. We hope that the next generation of the Bat system will be able to support aggregate location rates of around 1500Hz in a building the size of our laboratory.
Bat Publications
Please note that the techniques disclosed here have been
the subject of patent applications.
Page last modified on 1/7/05
Contact information
Copyright © 2002 AT&T Laboratories Cambridge